Урок 14
Программирование в TIA Portal обмена данными по сети
PROFINET между преобразователем частоты ATV630 и контроллером SIMATIC S7-1500
Задание
Сконфигурировать ПЧ и ПЛК так, чтобы ПЛК мог получать данные о состоянии ПЧ по сети PROFINET, и написать программу обработки данных в ПЛК.
Решение
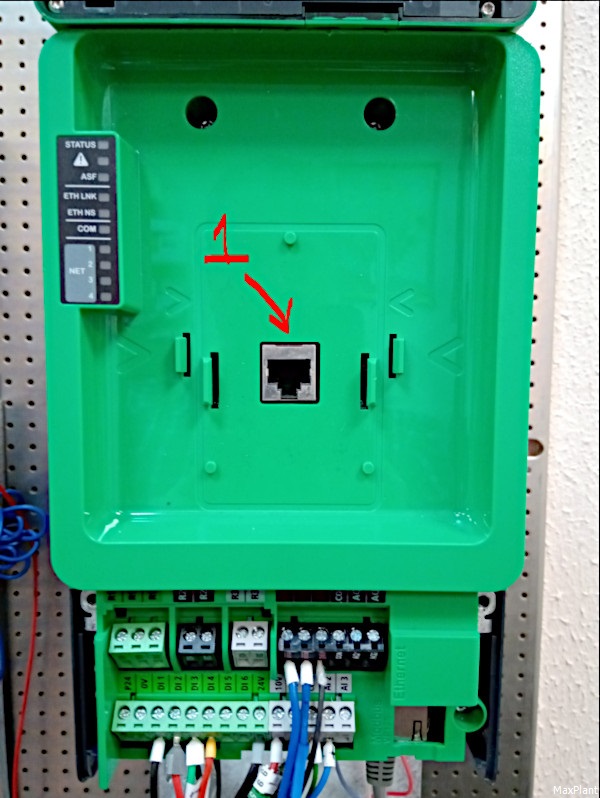
- В качестве ПЧ возьмём Altivar Process ATV600, у которого на борту есть 3 разъёма RJ45:
Первый – для подключения графического дисплея:
-
В правый слот расширения установим опциональный коммуникационный модуль PROFINET с двумя разъёмами
RJ45 и к разъёму 4 подключим патчкорд, связывающий ПЧ и ПЛК:

-
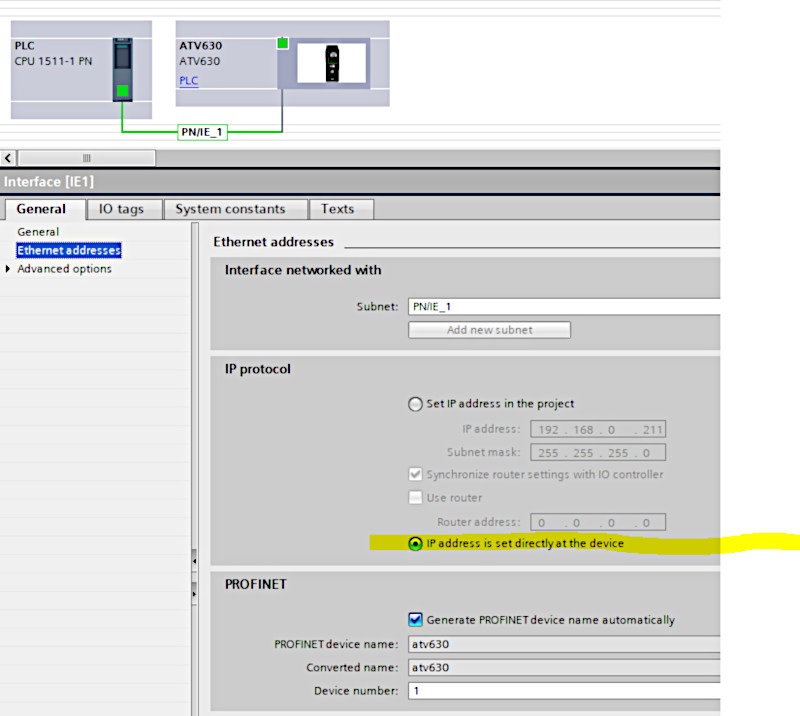
Есть 3 способа задания IP адреса ПЧ в сети PROFINET:
1. Фиксированный (fixed) – адрес задаётся вручную
2. DHCP – динамический адрес назначается автоматически DHCP сервером
3. DCP – фиксированный адрес назначается автоматически DCP сервером (контроллером S7-1500)
Выберем первый вариант и сконфигурируем адрес в TIA Portal:
-
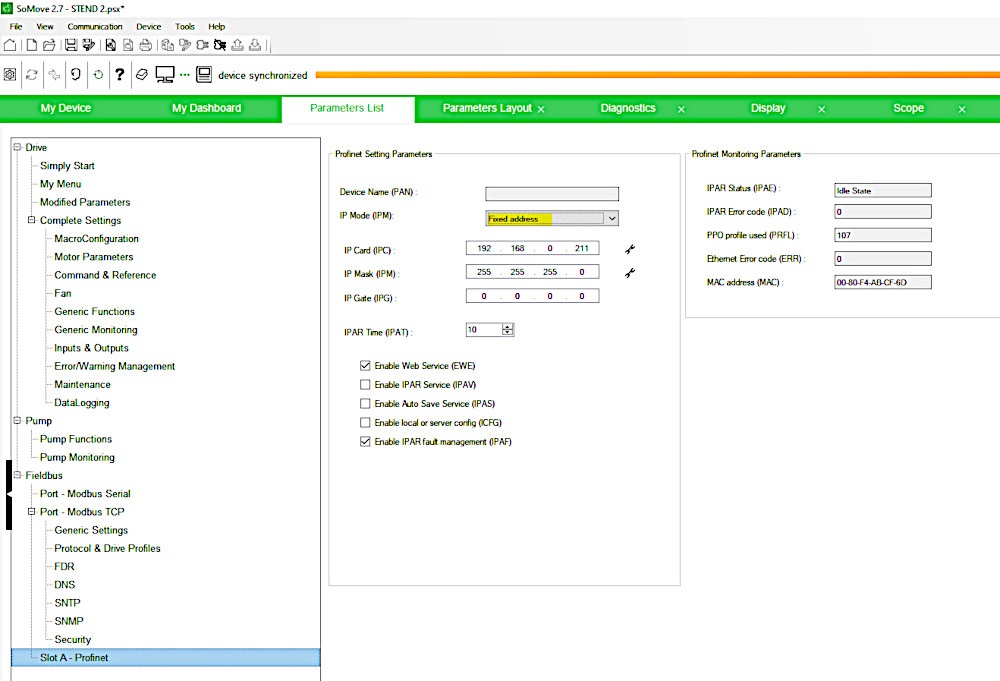
Адрес в ПЧ Altivar ATV600 конфигурируем с помощью программы SoMove:
-
В TIA Portal Network view нажимаем правой кнопкой на ATV630 и выбираем меню Device configuration:
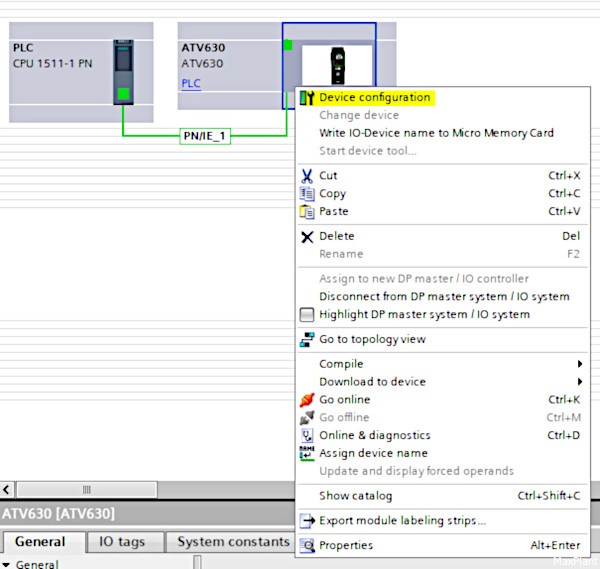
-
Выбираем подходящую телеграмму, например, Telegram 107, в которой есть 4 слова
для управления параметрами (4PKW) и 16 слов для циклического обмена данными (16PZD):
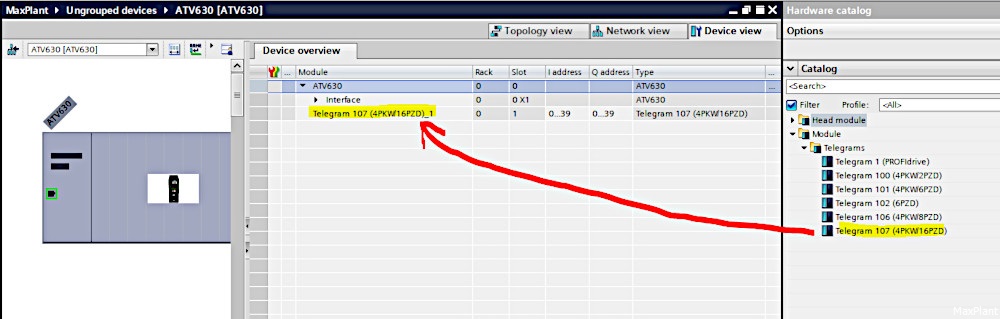
-
Управлять преобразователем частоты по шине PROFINET мы не собираемся,
поэтому деактивируем выходы, которые были активированы по умолчанию:
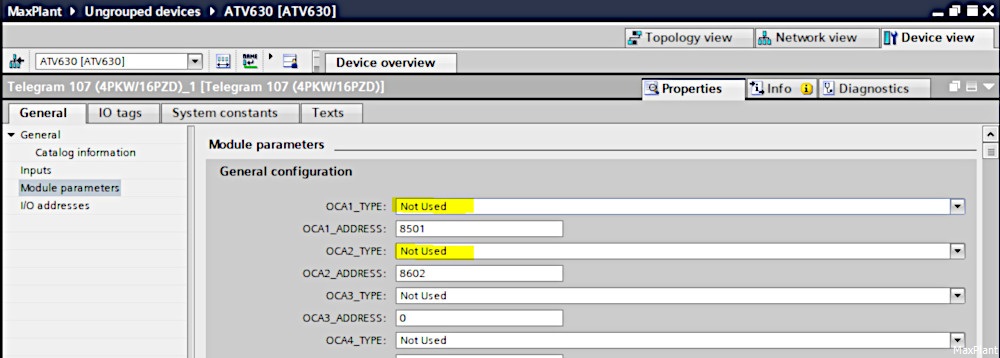
-
Свяжем первые 13 из 16 входных слов с данными, которые мы хотим передавать из ПЧ в ПЛК:
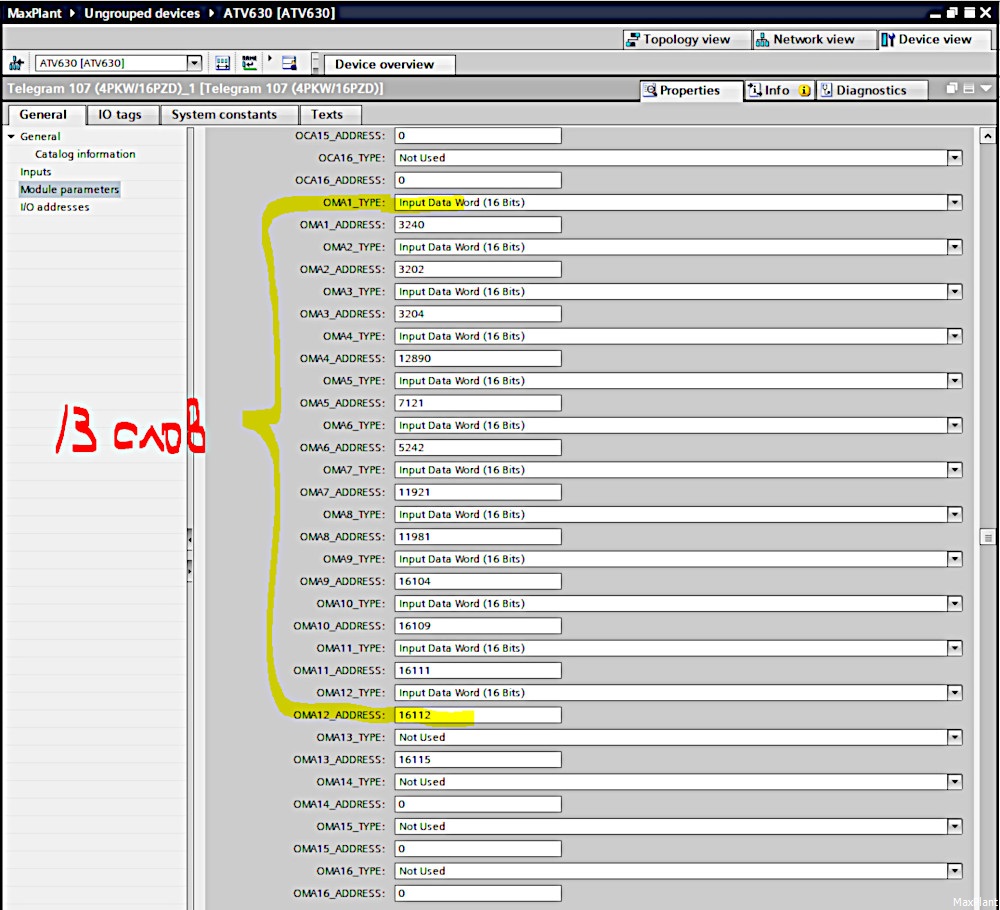
В этом примере выбраны данные ПЧ (коммуникационные параметры) с адресами:
Имя Адрес в ПЧ Абсолютный адрес в ПЛК Символьный адрес в ПЛК Описание 1 Drive state 3240 IW8 HMIS Статус привода 2 Motor frequency 3202 IW10 RFR Частота вращения двигателя, Гц 3 Motor current 3204 IW12 LCR Ток двигателя, А 4 Last warning 12890 IW14 LALR Код последнего предупреждения 5 Last Error occurred 7121 IW16 LTF Код последней ошибки 6 Physical value AI1 5242 IW18 AI1C Физическая величина аналогового входа 7 2nd PID preset reference 11921 IW20 RP2 Вторая предустановленная уставка задания ПИД-регулятора 8 PID feedback 11981 IW22 RPF Величина сигнала обратной связи ПИД-регулятора (фактическое значение регулируемой переменной процесса) 9 Status registers 4 16104 IW24 ST04 4-й регистр состояния 10 Status registers 9 16109 IW26 ST09 9-й регистр состояния 11 Status registers 11 16111 IW28 ST11 11-й регистр состояния 12 Status registers 12 16112 IW30 ST12 12-й регистр состояния 13 Status registers 15 16115 IW32 ST15 15-й регистр состояния
Для удобства, символьные адреса в ПЛК задаём равными кодовым именам соответствующих коммуникационных параметров ATV600. -
Адреса в ПЛК в предыдущей таблице получаем из следующих соображений.
Диапазон входных адресов нашего ПЧ: 0…39 (всего 40 байт):
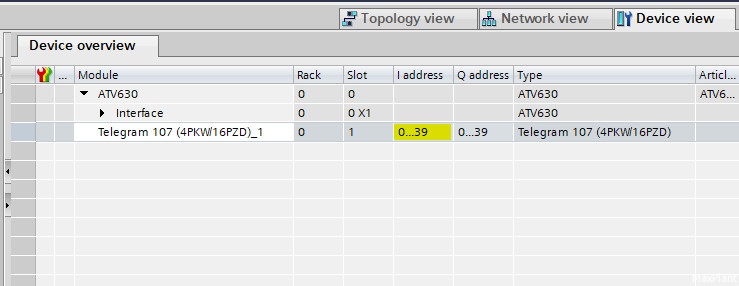
Слова этого адресного пространства адресуются так: IW0, IW2, … , IW38.
Первые 4 входных слова (IW0…IW6) мы не используем, а следующие 13 входных слов адресуются так: IW8…IW32. -
Посмотрим через Watch table, какие числа мы получаем по этим адресам:
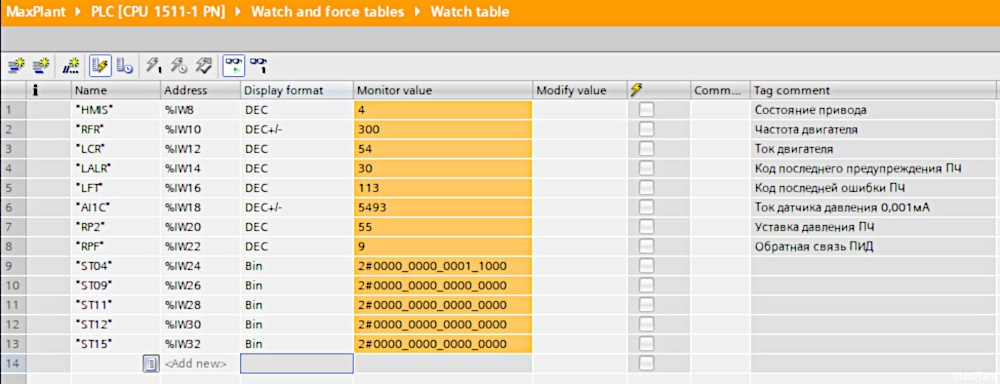
-
Составим таблицу соответствия между получаемыми по сети PROFINET числами и физическими значениями:
Символьный адрес в ПЛК Число Значение Описание 1 HMIS 4 Running Привод работает 2 RFR 300 30 Гц Частота вращения двигателя, Гц 3 LCR 54 0,54 А Ток двигателя, А 4 LALR 30 AI1 4-20 Loss Warning Код последнего предупреждения 5 LTF 113 AI3 Thermal Sensor Error Код последней ошибки 6 AI1C 5493 5,4 мА Физическая величина аналогового входа (4..20мА) 7 RP2 55 5,5 бар Вторая предустановленная уставка задания ПИД-регулятора 8 RPF 9 0,9 бар Величина сигнала обратной связи ПИД-регулятора (фактическое значение регулируемой переменной процесса)
Эта информация будет использоваться в программе ПЛК для преобразования получаемых чисел в числа для контроля и визуализации. -
Создадим функциональный блок FB6 "Обработка данных".
В цепочке 1 включаем индикатор "Готовность ПЧ", если код статуса привода равен 2 (Ready) и не задан режим "Ремонт":
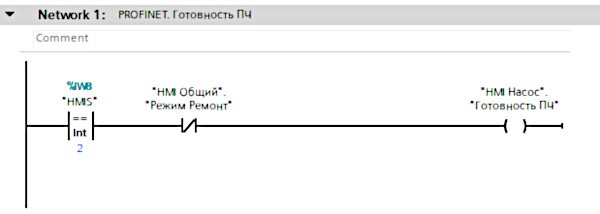
-
В цепочках 2 и 3 вычисляем частоту и ток двигателя: преобразуем целое число в вещественное и делим на
10 для частоты и на 100 – для тока:
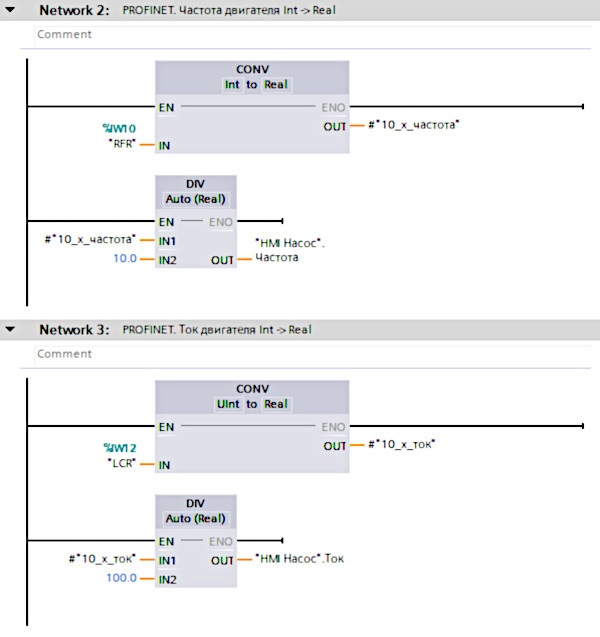
-
Перед тем, как анализировать биты состояния вспомним особенности адресации контроллеров SIMATIC.
Слова с адресами IW0 и IW1 пересекаются – байт IB1 входит в оба слова:
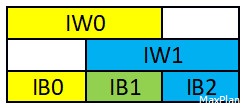
Адрес бита состоит из адреса байта и номера бита от 0 до 7. Например, адрес третьего бита в первом входном байте: I1.3.
В нашем преобразователе частоты биты в словах нумеруются от 0 до 15.
Если слово ST12 из ПЧ передаётся в слово IW30 в ПЛК, то какой адрес в ПЛК будет иметь бит 0 (который в слове ST12 равен 1 при обрыве аналогового сигнала на входе AI0)?
Этот бит окажется в крайнем правом положении слова IW30 (в байте IB31), его адрес: I31.0

Второй – для подключения к сети Ethernet Modbus TCP.
Третий – для подключения к последовательной шине Modbus RTU:

Урок 15. Счётчик моточасов (времени наработки)
Урок 13. Контроль присутствия устройств в сети PROFINET или PROFIBUS для S7-1200 и S7-1500