Урок 19
Применение функционального блока PID
ПИД-регулятор
PID – функциональный блок ПИД-регулятора
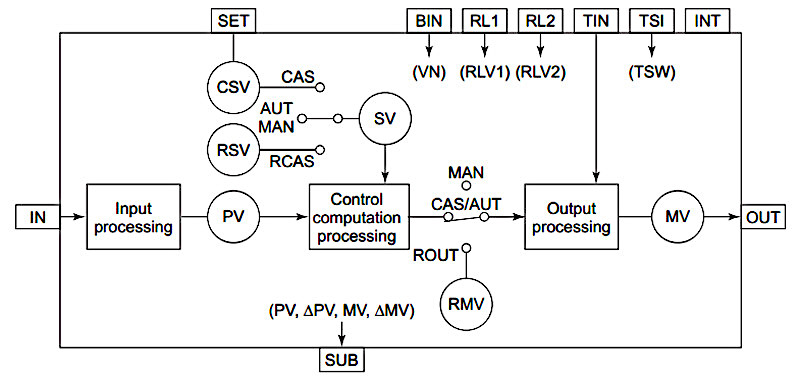
Режимы работы ПИД-регулятора
Функциональный блок PID поддерживает все 9 базовых режимов работы.
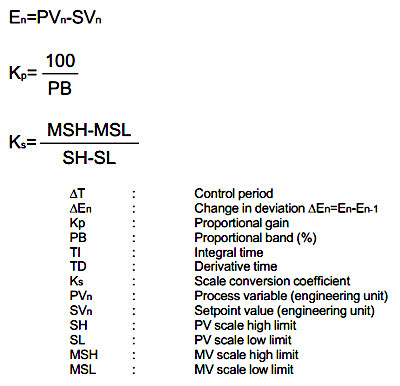
Блок-схема алгоритмов работы ПИД-регулятора
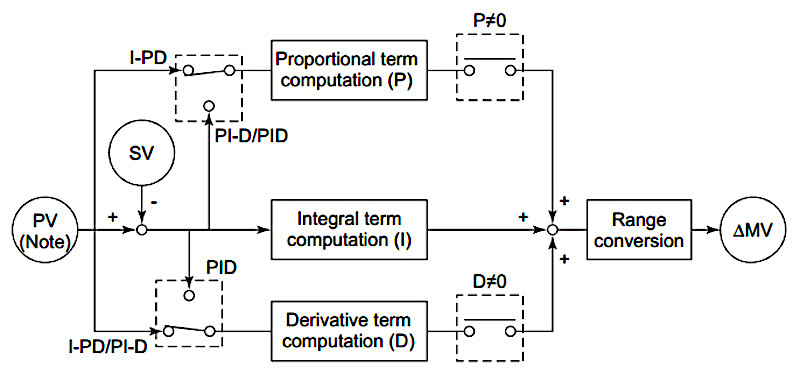
Типы алгоритмов ПИД-регулятора
| N | Тип | P | I | D | Формула ПИД-регулятора |
|---|---|---|---|---|---|
| 1 | PID | + | + | + | 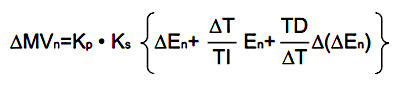 Все три компоненты регулятора (P+I+D) реагируют на изменение рассогласования. |
| 2 | I-PD | PV | + | PV |  Только интегральная компонента (I) реагирует на изменение рассогласования, пропорциональная (P) и дифференциальная (D) компоненты реагируют только на изменение PV. |
| 3 | PI-D | + | + | PV | 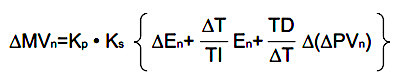 Пропорциональная (P) и интегральная (I) компоненты реагируют на изменение рассогласования, а дифференциальная (D) компонента реагирует только на изменение PV. |
| 4 | Автоматический | Аналогична I-PD в режиме AUT. Аналогична PI-D в режимах CAS и RCAS. |
|||
| 5 | Автоматический 2 | Аналогична I-PD в режимах AUT и и RCAS. Аналогична PI-D в режиме CAS. |
Задание
Запрограммировать регулирование уровня жидкости в баке с помощью насоса с частотно-регулируемым электроприводом.
Решение
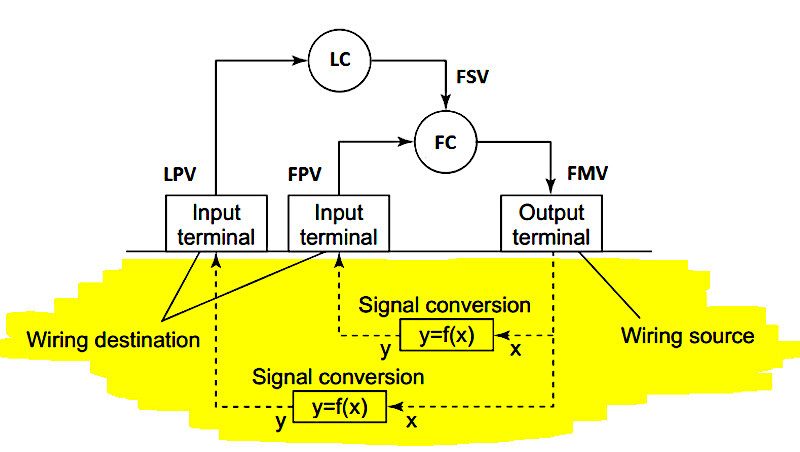
Реализуем каскадное регулирование, в котором ПИД-регулятор расхода подчинён ПИД-регулятору уровня.
| ПИД регулятор уровня (LС) | ПИД регулятор расхода (FС) | |
|---|---|---|
| Объект управления | Бак (уровень) | Насос (расход) |
| Исполнительное устройство | Преобразователь частоты (ПЧ) | |
| Заданное значение (SV) | LSV (заданный уровень) | FSV (заданный расход) |
| Процессная переменная (PV) | LPV (фактический уровень) | FPV (фактический расход) |
| Выход регулятора (MV) | LMV (заданный расход) | FMV (частота ПЧ) |
Жёлтым маркером отмечено "поле" (объекты управления, датчики и исполнительные устройства), передаточные функции которого мы будем симулировать (см. Урок 5, шаг 15).
- Запускаем System View и открываем проект TRAINING
-
Открываем редактор IOM модуля аналоговых входов:
FCS0101 > IOM > NODE1 > 1AAI141-S
и задаём символьные имена для аналоговых входов:
%%LPV, %%FPV

-
Открываем редактор IOM модуля аналоговых выходов:
FCS0101 > IOM > NODE1 > 2AAV542-S
и задаём символьное имя для аналогового выхода:
%%FMV

-
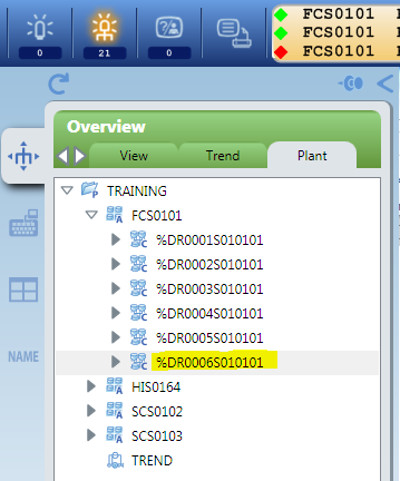
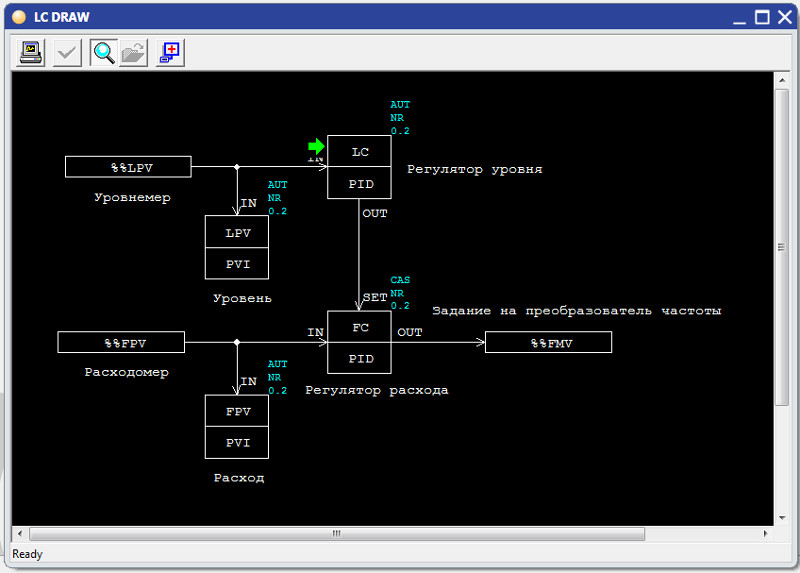
Открываем редактор схем управления Control Drawing:
FCS0101 > FUNCTION_BLOCK > DR0006
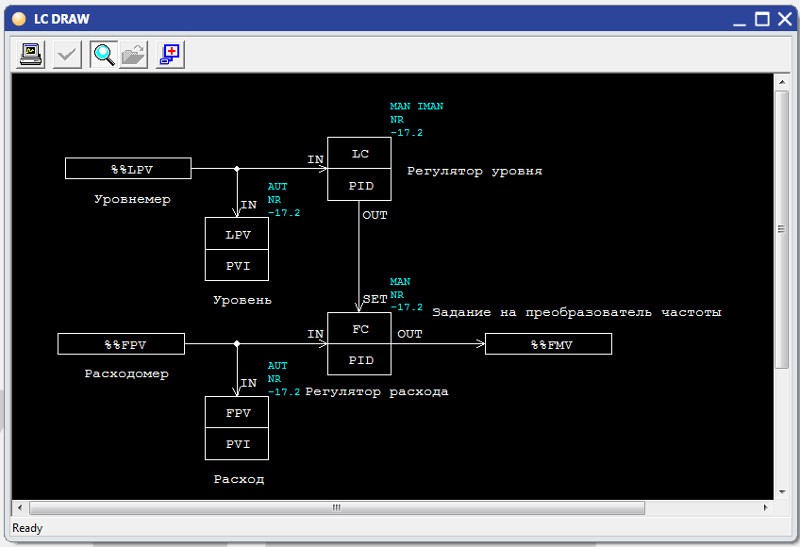
и создаём следующую схему управления:
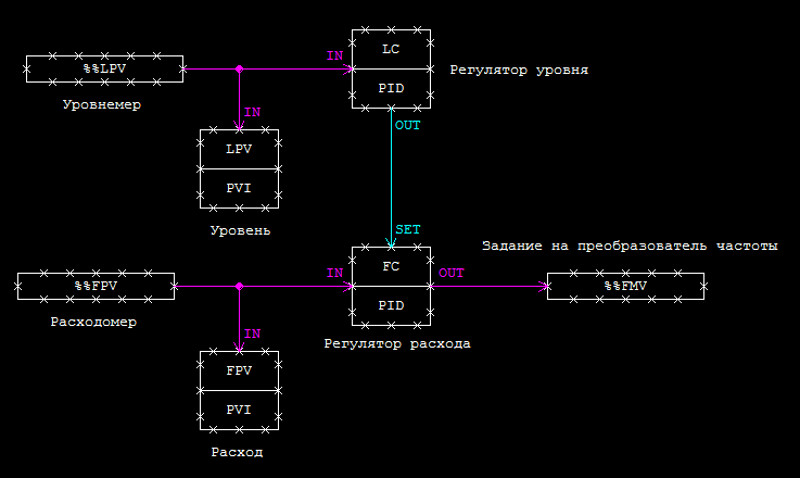
Блоки PVI добавляем, чтобы посмотреть переходные процессы уровня и расхода. -
Для начала просто оживим нашу схему с помощью симулятора – запускаем виртуальный симулятор:
FCS > Test Function -
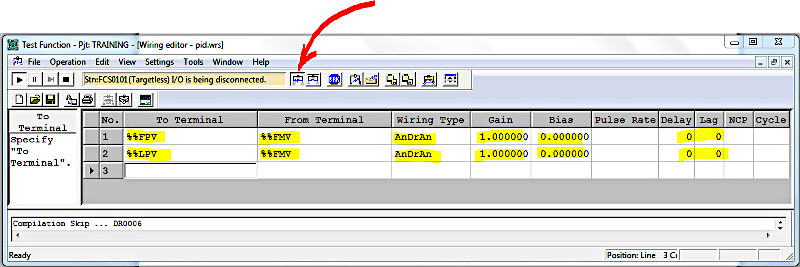
Нажимаем кнопку [Wiring Editor] и добавляем две простейшие передаточные функции для поля:
Нажимаем кнопку [Save] и загружаем конфигурацию в контроллер:
File > Download… -
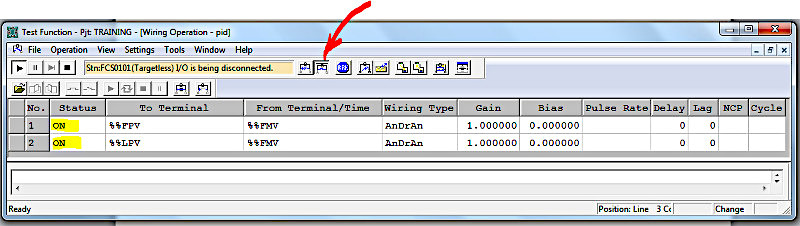
Нажимаем кнопку [Wiring Operation] – должен появиться статус ON для обеих связей:
-
Открываем окно статуса схемы управления:
-
Вызываем лицевую панель блока FC:
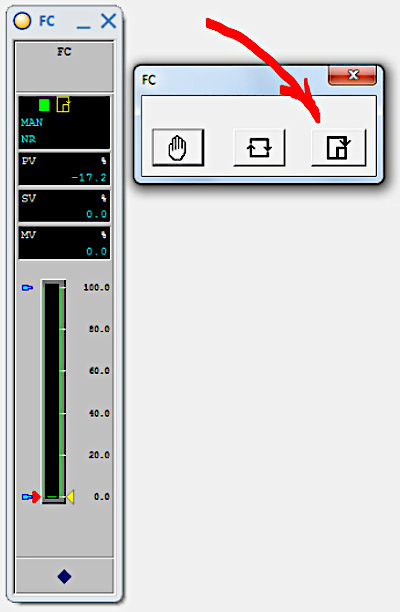
и переводим регулятор расхода в каскадный режим работы (CAS). - Вызываем лицевую панель блока LC и переводим регулятор уровня в автоматический режим работы (AUT).
-
Статус схемы управления оживает:
-
Вызываем лицевые панели блоков LC, FC, LPV.
Изменяем интегральные компоненты блоков LC и FC на 5 секунд:
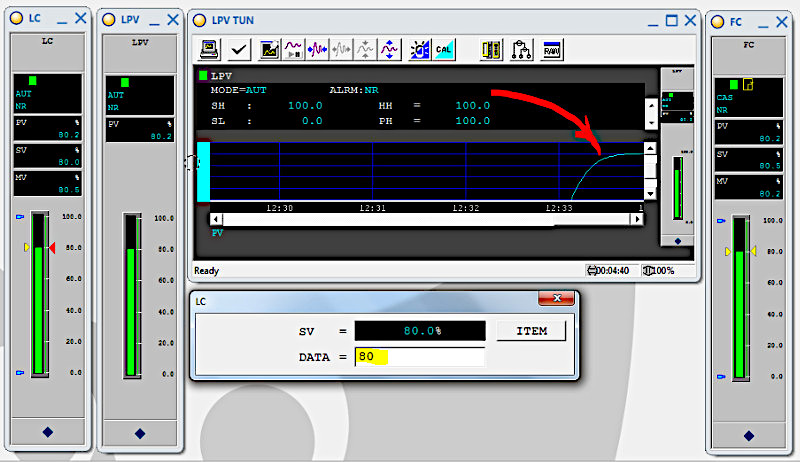
- Открываем панель тюнинга блока LPV.
-
Устанавливаем заданное значение уровня на 80%:
и наблюдаем, как ПИД-регуляторы отрабатывают заданное значение:
- Самостоятельно поиграйте с настройками ПИД-регуляторов и передаточных функций симулятора поля.